We realize the job to build an ultra-detailed Mars 2020 Perseverance Rover replica with all the parts motorized movable exactly the way as the one on Mars is more difficult than we thought at the beginning. Therefore, we plan to build a 1:4 Mars Perseverance rover static replica before we physically build the 1:3 motorized one. All the movable components of the 1:4 Mars Perseverance rover static replica can at least do the same actions as the real Mars 2020 Perseverance Rover replica can manually, while for some components we will design motorized mechanical structure.
As I mentioned in my first two diaries, the major two challenges in the design and building of the Mars 2020 Perseverance Rover replica are the wheels and the robotic arm.
The wheel tread challenge is solved already using steel instead of aluminum, although the spokes are another challenge in wheels.
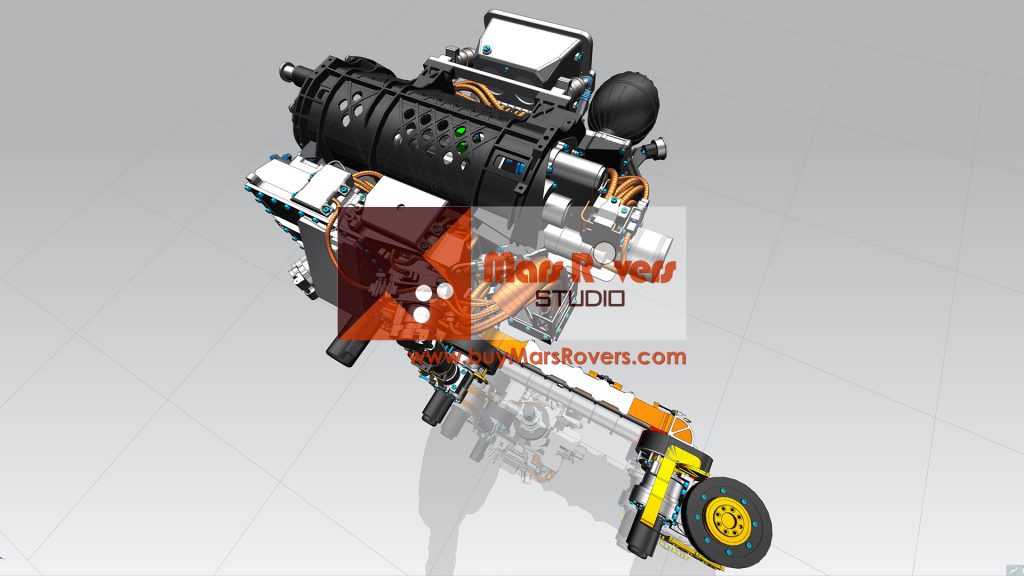
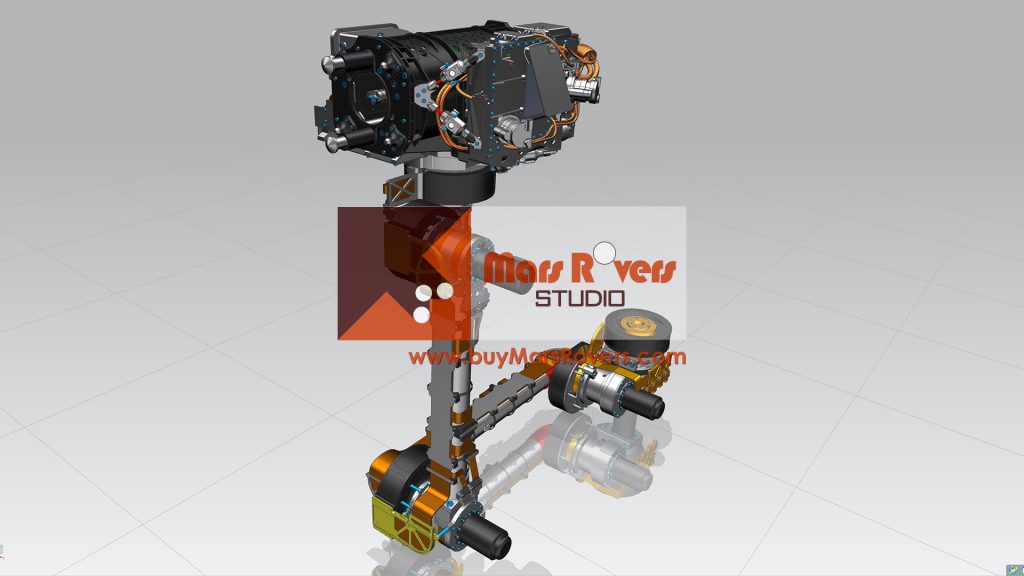
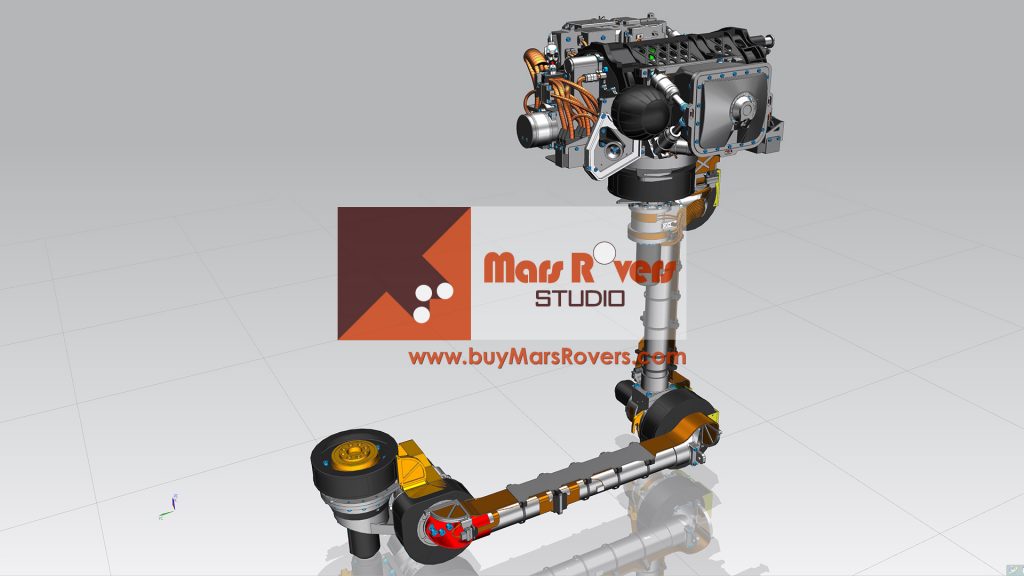
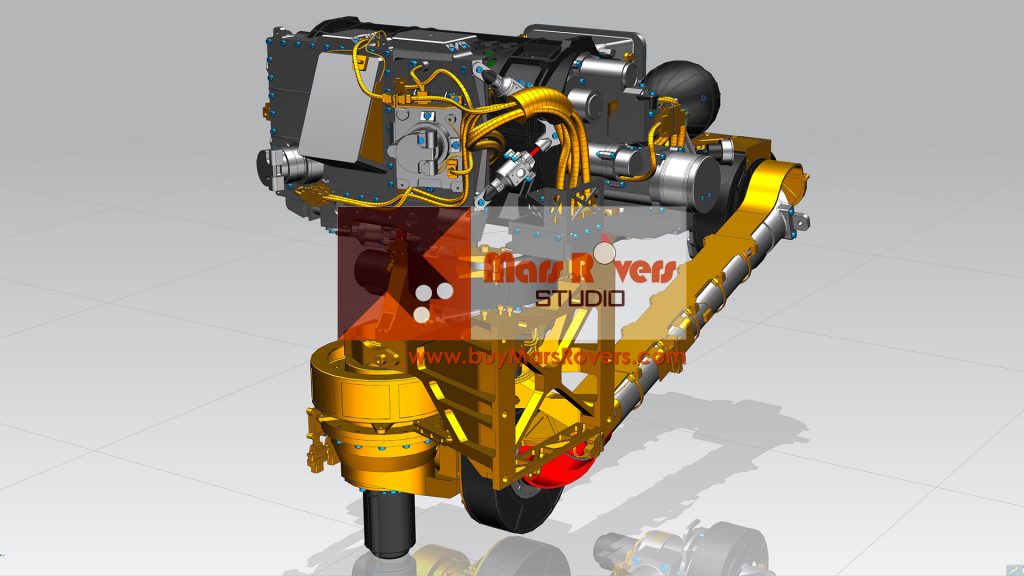
However, the 1:3 Perseverance Mars rover replica’s long robotic arm with a heavy turret at the end of it is THE big challenge. All the mechanical structures, especially the motorized structures, require a high level of machining accuracy, motors with high ratio gearbox to provide large torques, and little compromising to the external shape in all positions.
Our technologies can achieve the goal for sure but it is always sweet if we can plan something to facilitate this journey.
One good option is to build a 1:4 Mars Perseverance rover static replica first. A smaller model is a widely used approach in industrial design and mechanical engineering which allows designers and engineers to verify designs in a much more cost-efficient way.
In our 1:4 Mars Perseverance rover static replica, we will keep the following features.
- precise external shape and detail replica to the Perseverance Mars rover.
- functional wheels with their own individual motors and the “rocker-bogie” suspension system exactly as they are in the Perseverance Mars rover.
- mast with motors can do exactly the same actions as the Perseverance Mars rover can
- steerable X-Band High-Gain Antenna can do exactly the same actions as the Perseverance Mars rover can
- a simplified remote control
- maybe more features
We are also considering building the long robotic arm with light-duty motors to realize all the same actions as that of the Perseverance Mars rover. To reduce the challenge, the turret will be just an empty shell so as to minimize the weight but keep the appearance.
Meanwhile, we will also build another version of the long robotic arm for the 1:4 Perseverance Mars rover replica. In this version, all the internal motorized mechanical structures to realize the drill function, cameras, electronic components will be designed and built into the turret so that we can have a relatively precise estimation of the weight for the turret in the 1:3 Perseverance Mars rover replica. What’s more, the arm will be thoroughly designed to have all the external details and internal motorized mechanical structure while the motors will not be installed inside joints. Instead, in those positions, there will be specially designed bearing structures to allow manually pose change for the arm. This specially built arm will help us get a relatively precise estimation of the torque required in each joint of the robotic arm in the 1:3 Perseverance Mars rover replica.